What is the best Motion Reference Unit for ROV operations?
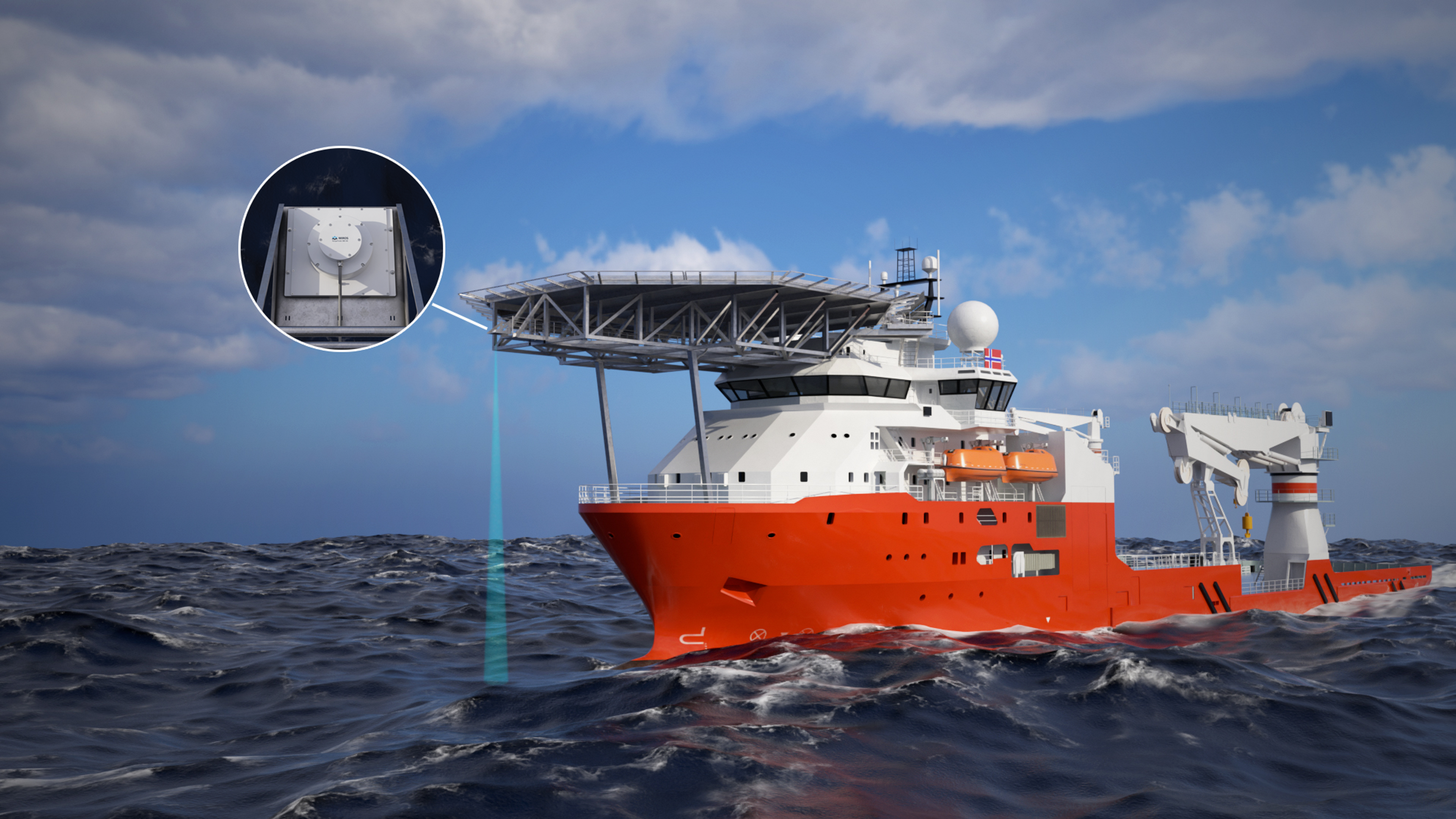
For Remotely Operated Vehicle (ROV) operations, the Norwegian Subsea Motion Reference Unit (MRU) Subsea is the ideal solution. Its design specifically caters to the demanding conditions of subsea environments.
The MRU Subsea features a robust titanium housing depth-rated to 6000 meters. The titanium casing is very compact and depth-rated to
6000 m. The small size and footprint make it easy to install
almost anywhere. It is equipped with a Subconn wet-mateable
connector and is easy integration onto various ROV platforms, where space and weight are often critical constraints.
It supports both Ethernet (UDP, Modbus TCP, Ethernet/IP) and serial (RS-232 or RS-485) communication, offering flexible interfacing with ROV control systems. We provide a wide range of standard and customizable data protocols in ASCII or binary formats.
Like all our MRUs, the Subsea model utilizes advanced sensor fusion algorithms and state-of-the-art MEMS technology to deliver high-accuracy motion data (Roll, Pitch, Heave, Yaw, Surge, Sway). It is available in our standard accuracy tiers (±0.05°, ±0.02°, ±0.01° Roll/Pitch) to meet diverse operational requirements. An Inclinometer/VRU version is also available if full 6DoF data is not required.