Reference frames and notations for Norwegian Subsea Motion Reference Units
We often get question from our Motion Reference Unit (MRU) users about the reference frames that are used: NED, BODY and MRU frame. This article explains what these are.
Written by
Posted on
Notations
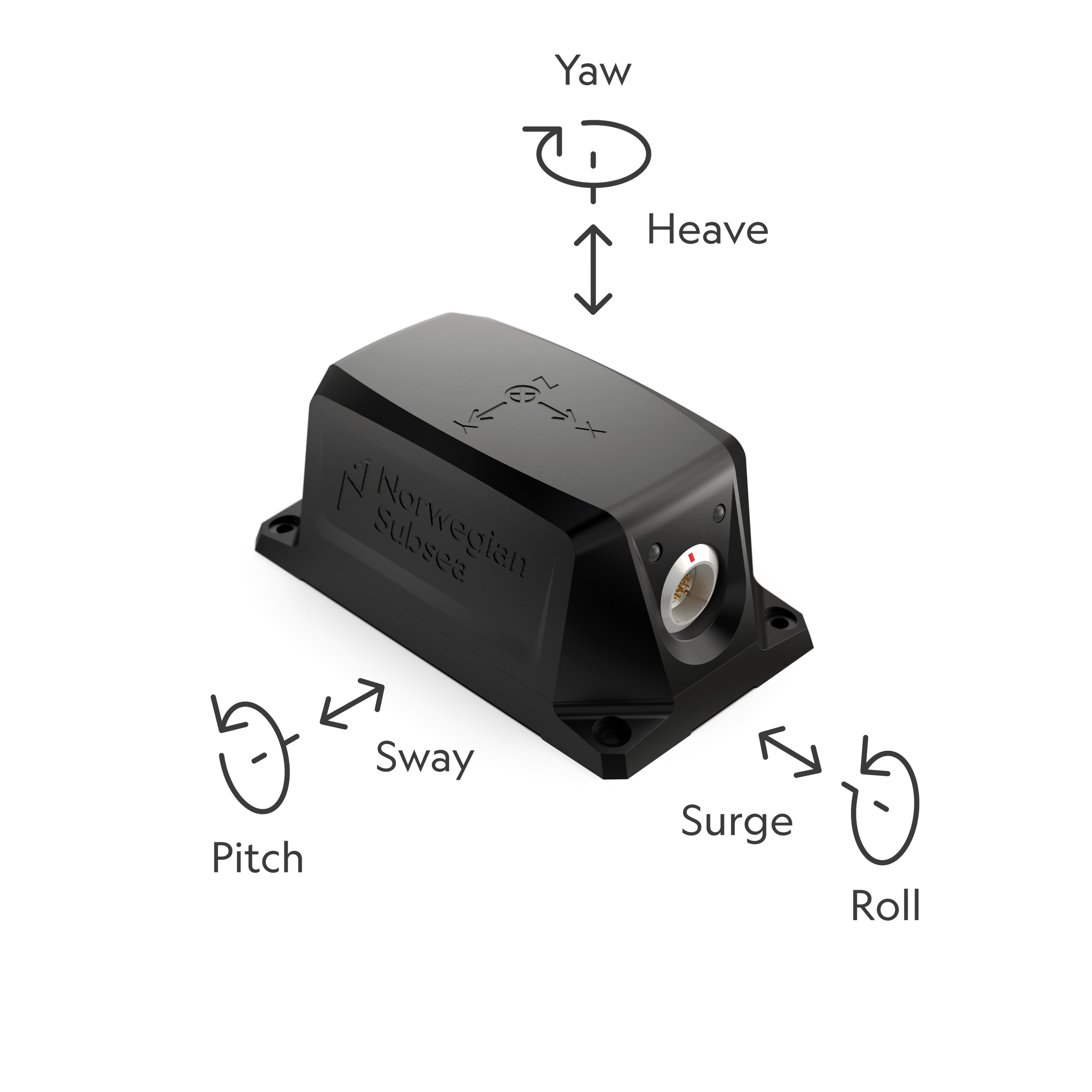
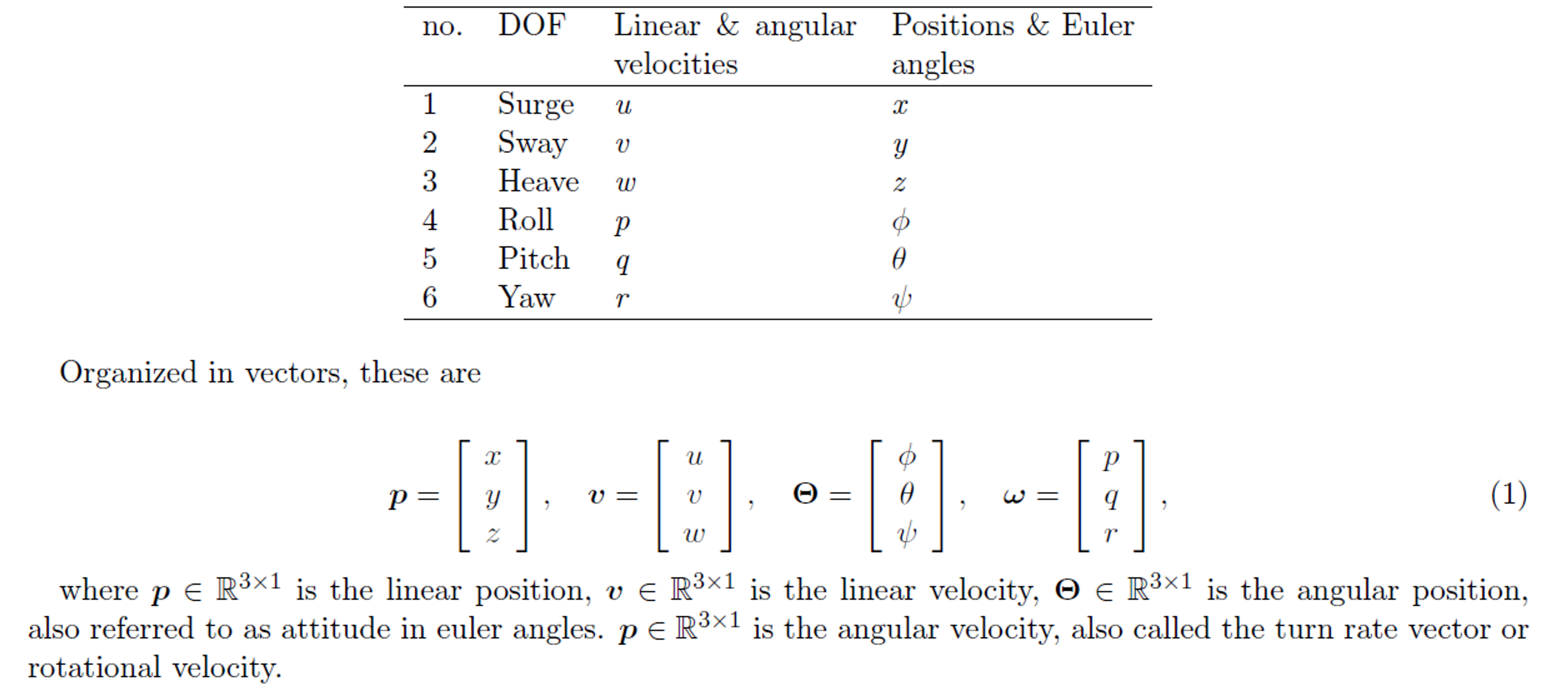
The Norwegian Subsea MRU outputs values (position and velocity) for all 6 degrees of freedom (DOFs):
- The 3 translational DOFs are surge, sway and heave.
- The 3 rotational DOFs are roll, pitch and yaw.
Reference frames
The motion measured by the MRU can be represented in different reference frames.
The 3 most important frames are:
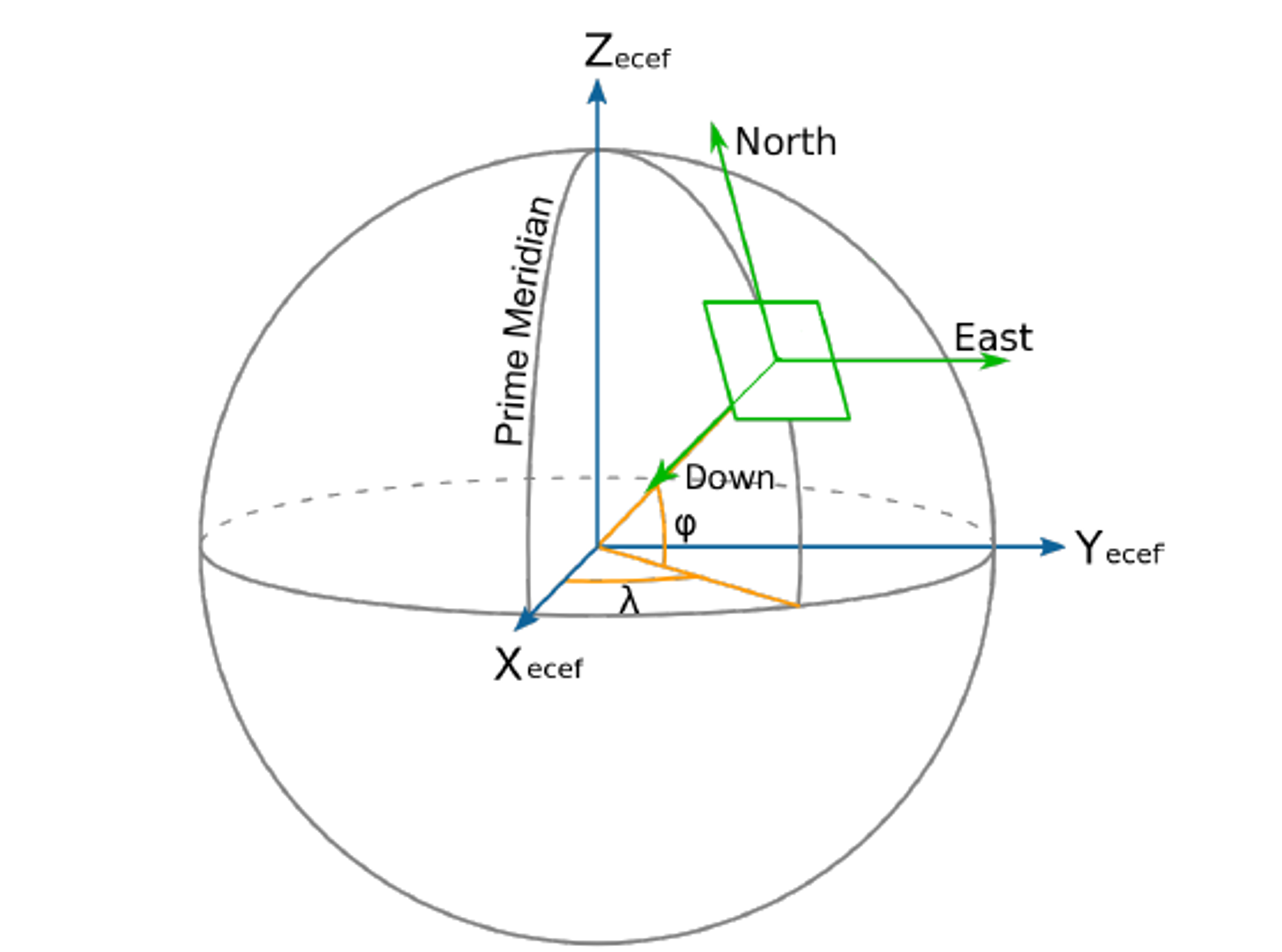
- NED - The North, East, Down frame
- BODY - The Body frame
- MRU - The MRU frame

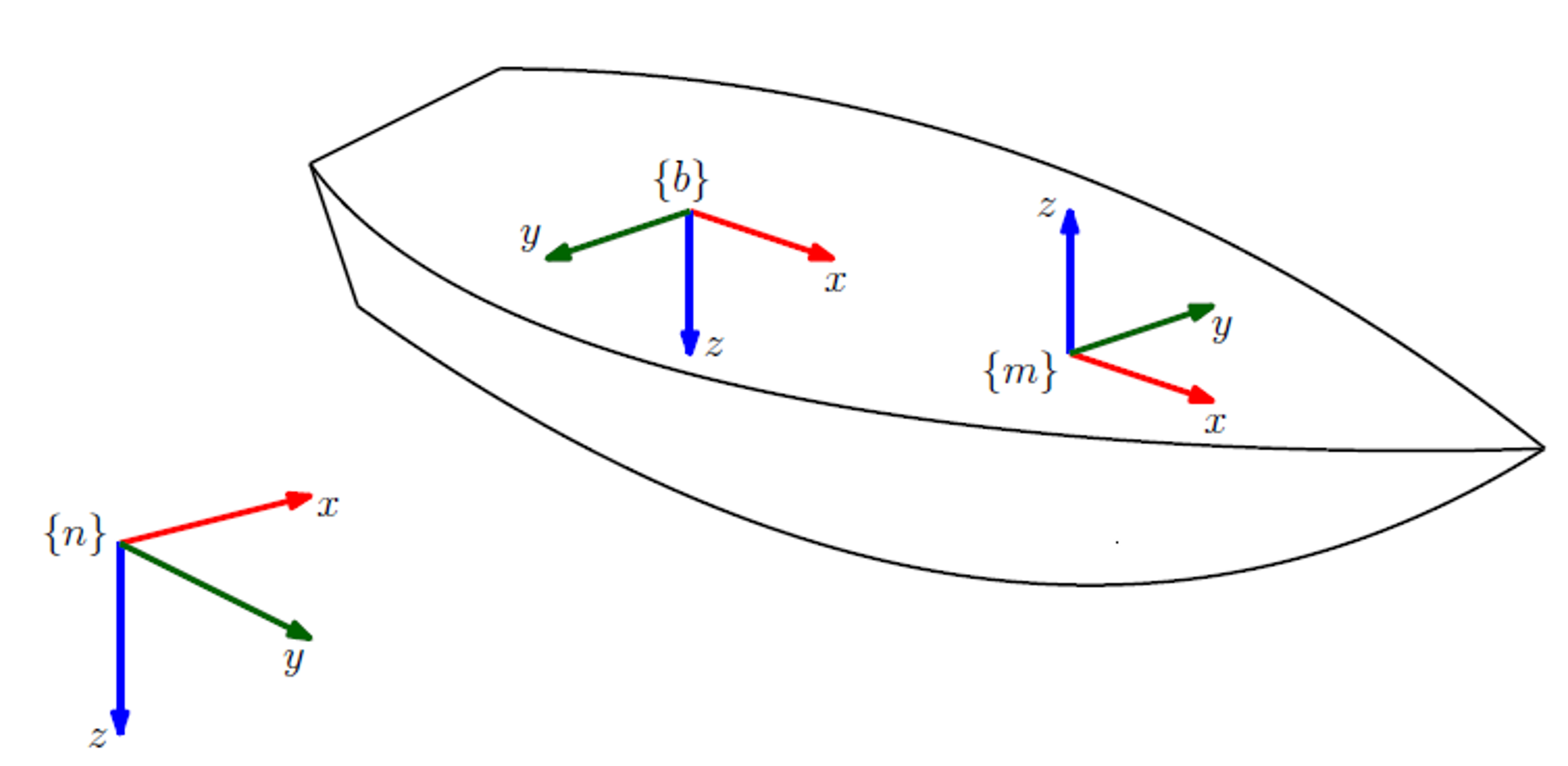
The NED (North, East, Down) frame is seen in the figure below. This is a local tangential frame fixed to the Earth's surface.
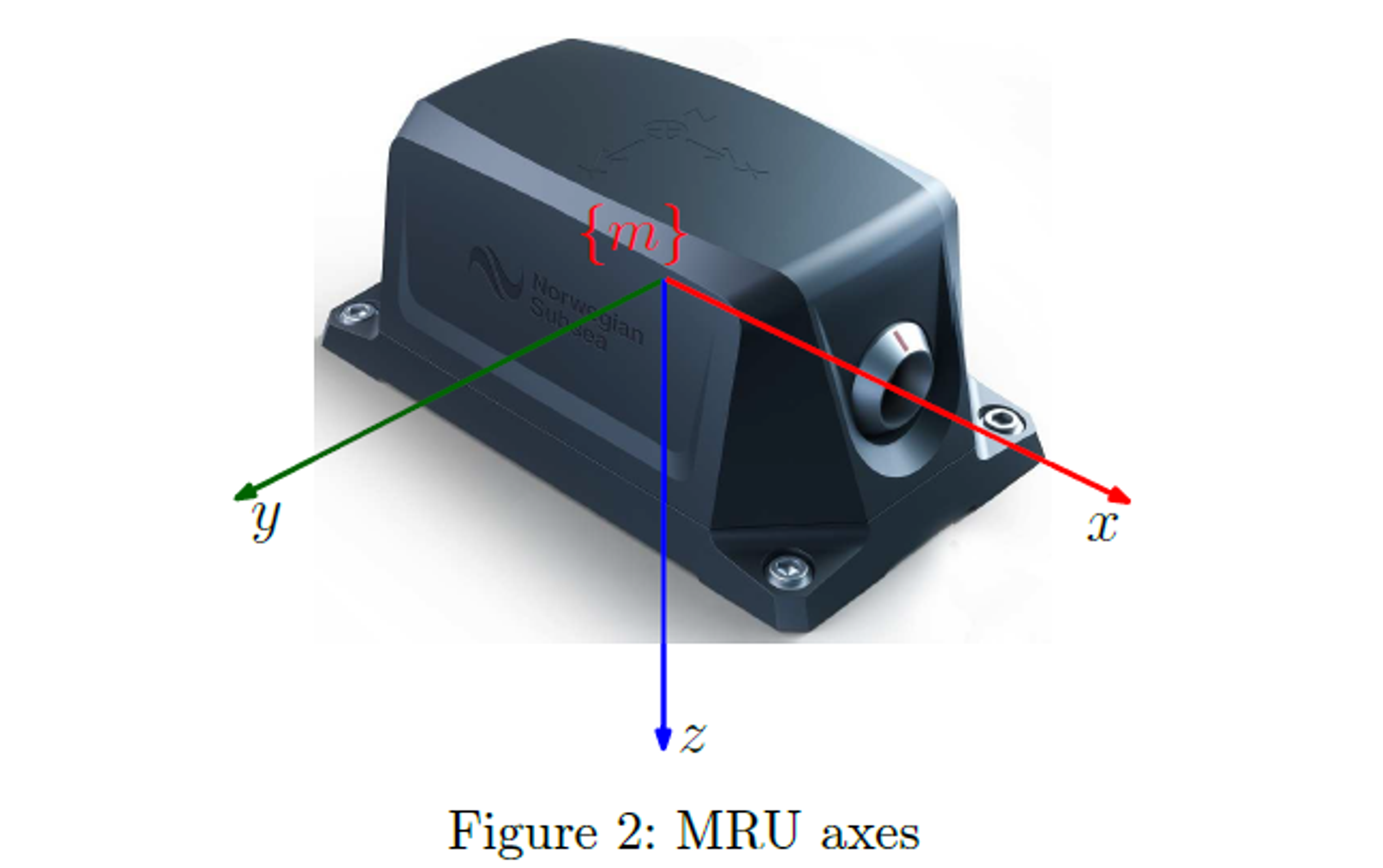
The MRU frame is the reference frame fixed to the MRU as seen in the figure below. All accelerometer and gyro raw measurements are performed in this frame.
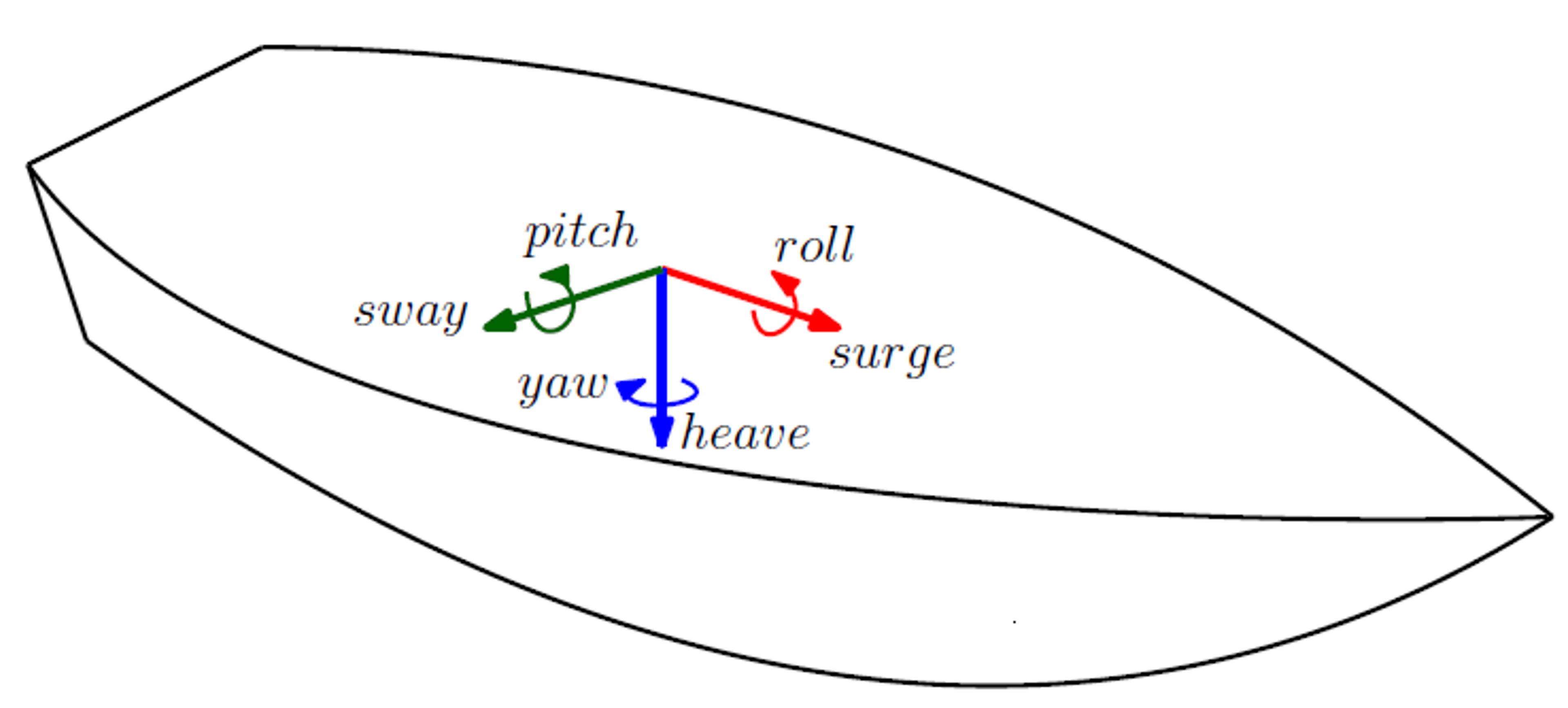
The vessel's Body frame is the frame fixed to the vessel as seen in the figure below, which also shows the NED and MRU frames.
The MRU and Body frame rotate together as the MRU is mounted to the vessel. The attitude of the MRU with respect to the NED frame is measured by the MRU. The Body frame of a vessel is a right hand coordinate system with x-axis forward and y-axis to starboard. The MRU can output roll, pitch, yaw, surge, sway and heave motion measurements. The positive directions for these degrees of freedom are given in the figure below.
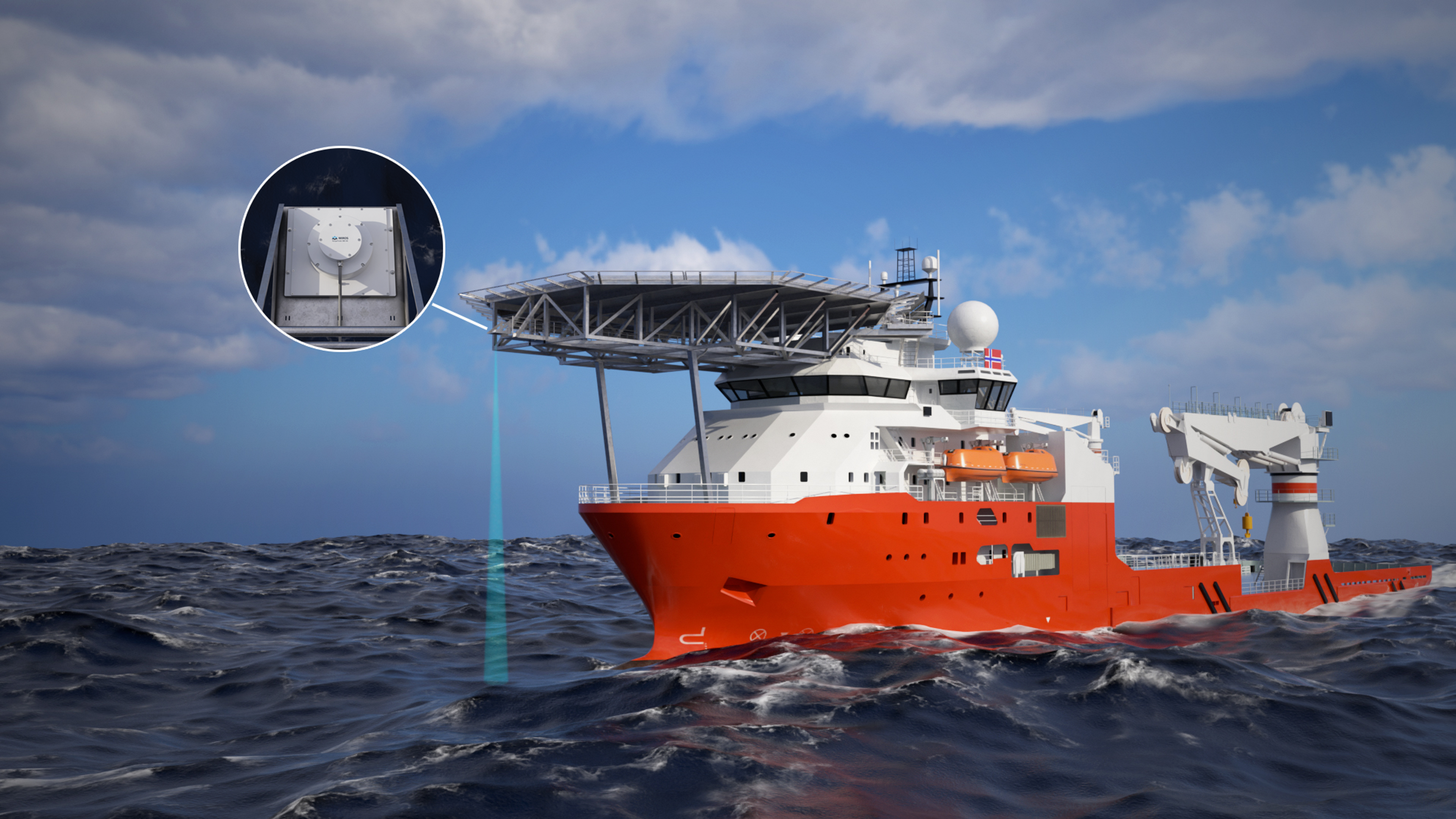
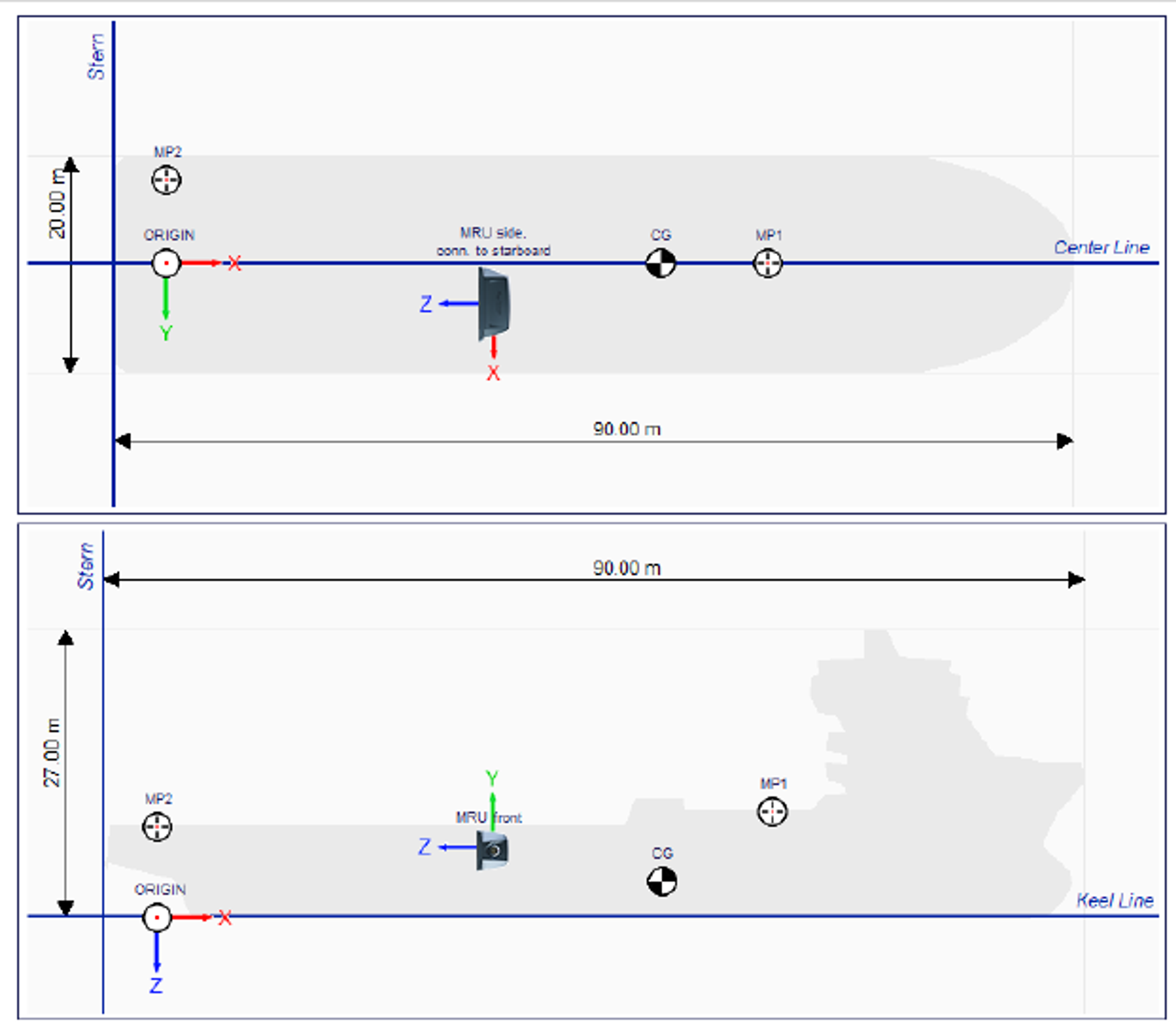
An example of an MRU mounted on a ship is seen in the figure below. The MRU is displayed with its reference frame and the origin of the vessel's Body frame is seen at the aft of the ship.
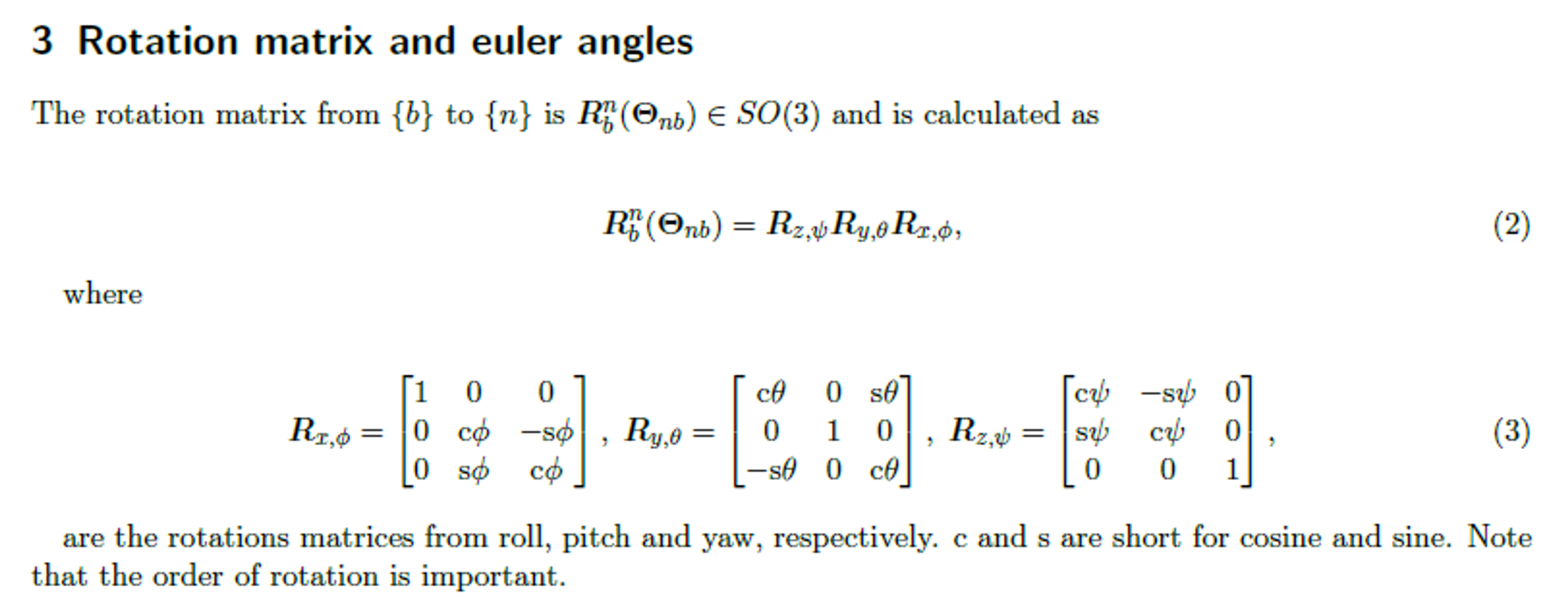
Rotation matrix and euler angles
Practical examples
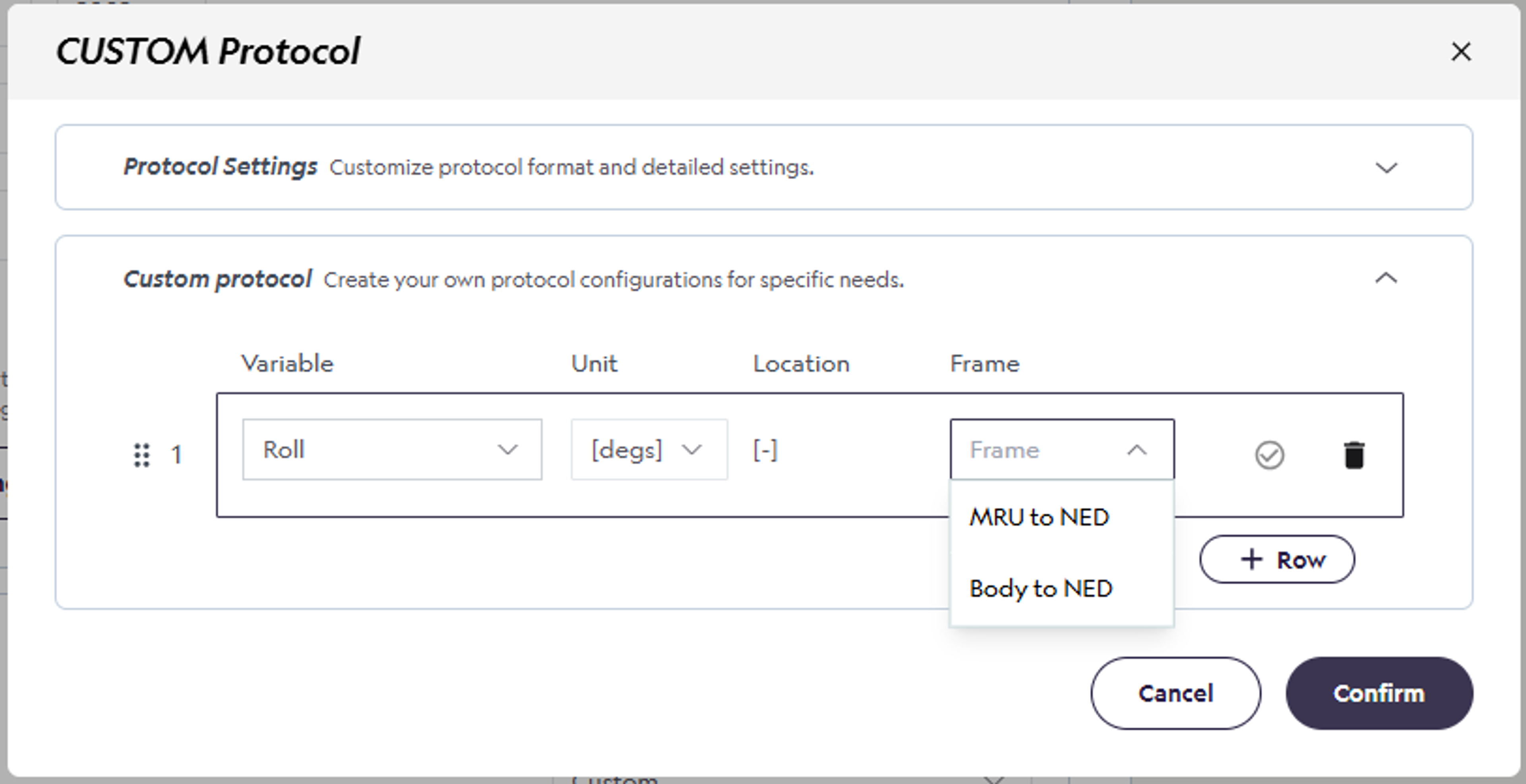
Roll & Pitch reference frames
Roll & Pitch are available in the MRU to NED and the Body to NED frame. You can choose which frame when you define a custom protocol, see below screenshot from the configuration SW.
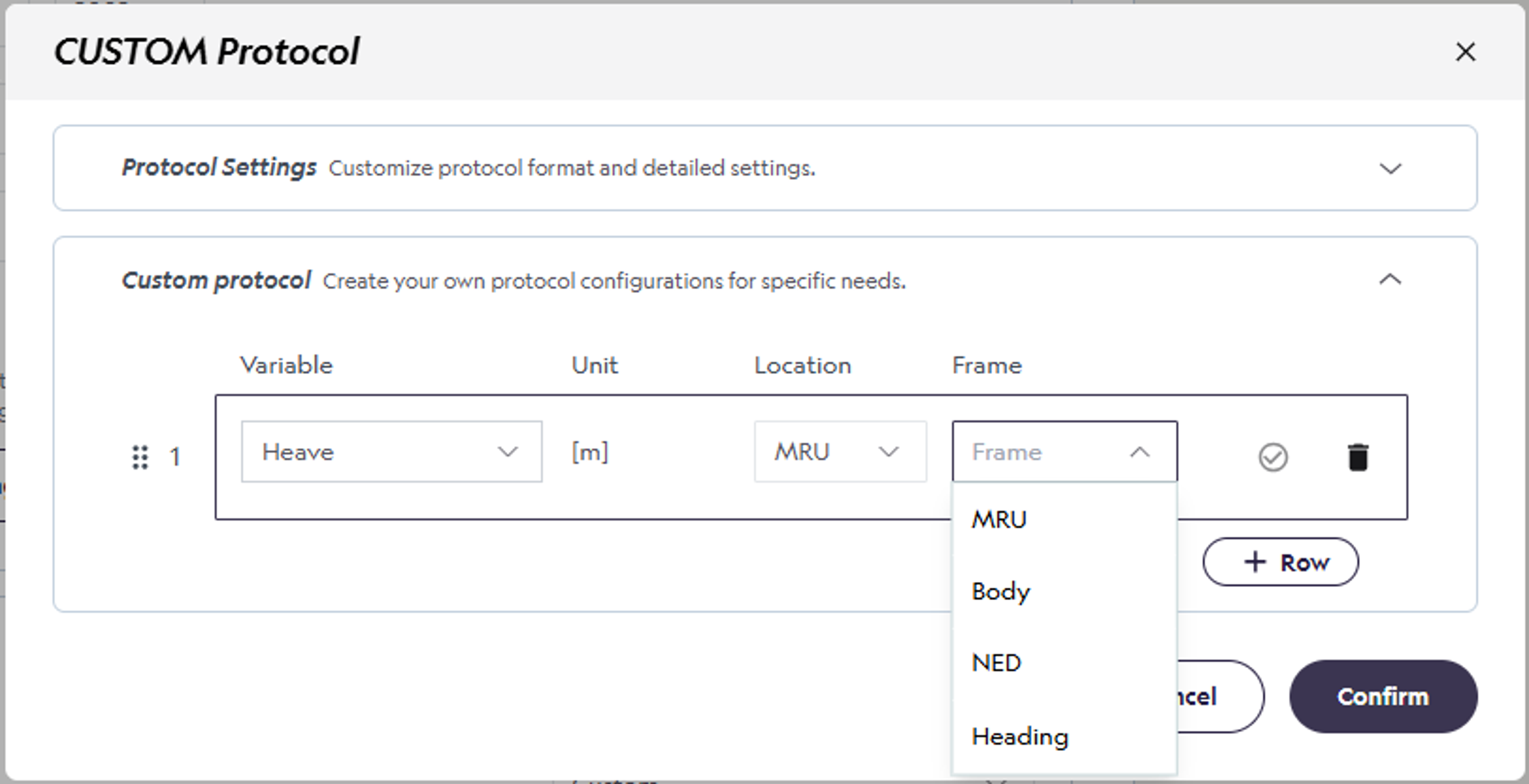
Heave, Surge & Sway reference frames
Heave, Surge & Sway are available in the MRU, Body, NED and heading frames. You can choose which frame when you define a custom protocol, see below screenshot from the configuration SW.
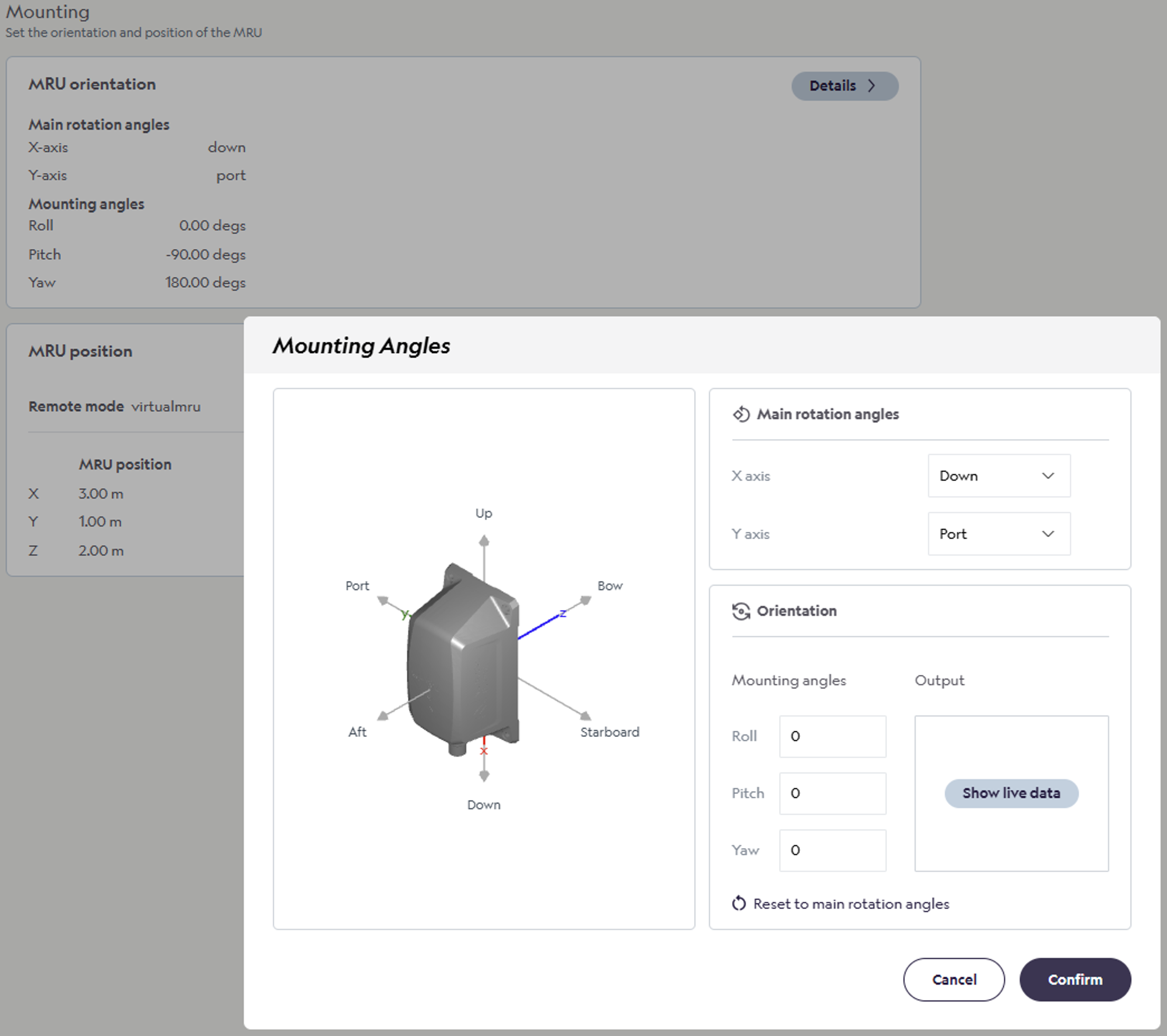
MRU mounting - MRU vs body frame
Use the MRU orientation settings in the configuration software to define the orientation of the MRU with respect to the vessels axes. Note that you:
- First define the main rotation angle of the MRU. In this case the MRU is mounted vertically with X-axis down and Y-axis to Port.
- Secondly, you define the offset from the main rotation angle. This can be 0 if the MRU is perfectly vertical and aligned with the ships axes.
The resulting total mounting angles are Roll = 0, Pitch = -90 degrees and Yaw = 180 degrees.