MRU Configurator
User friendly MRU configuration
All Norwegian Subsea Motion Reference Units (MRUs) can be easily configured using the web-based configurator.
Configuration settings of the MRU consists of:
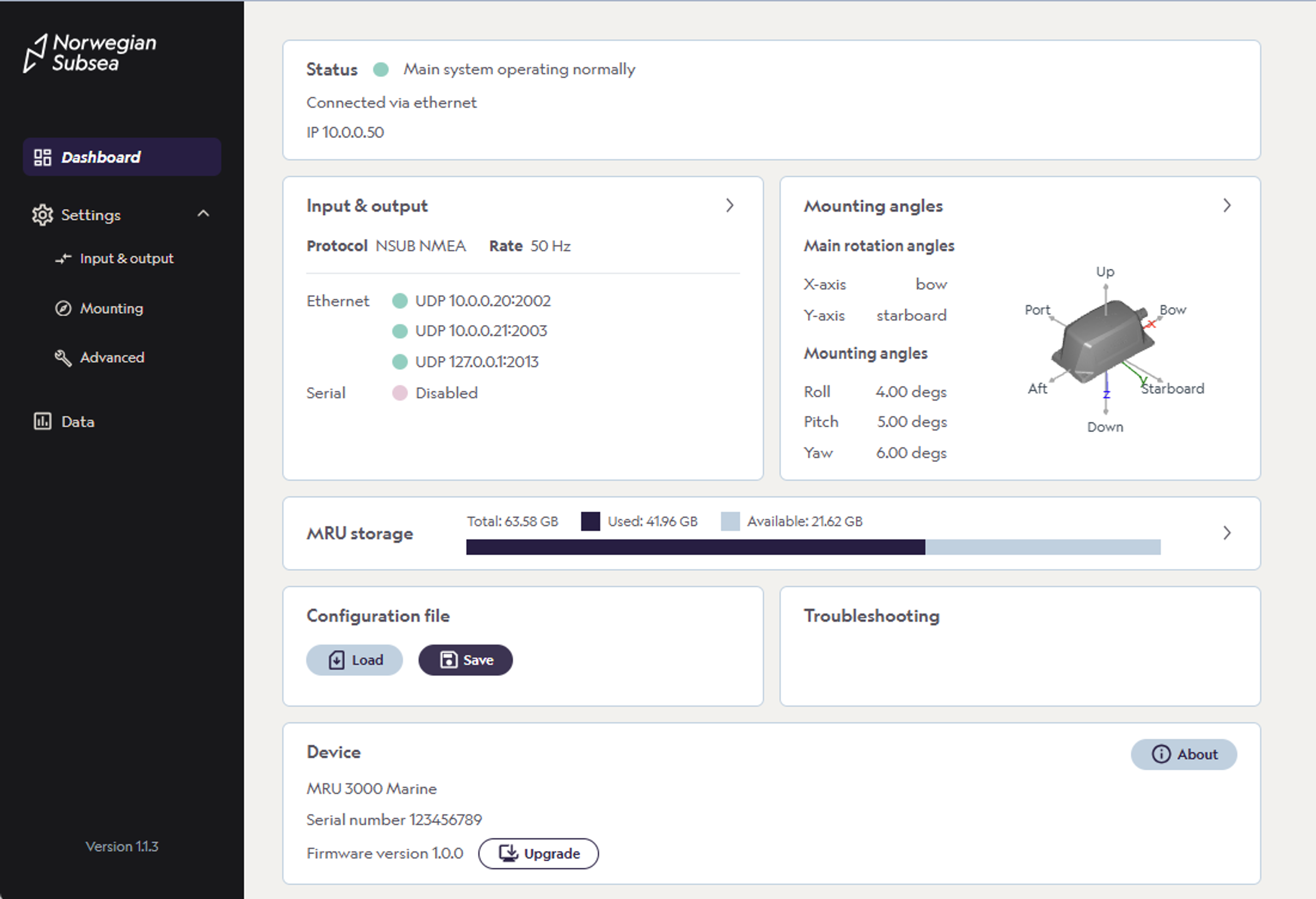
- Communication ports and protocols
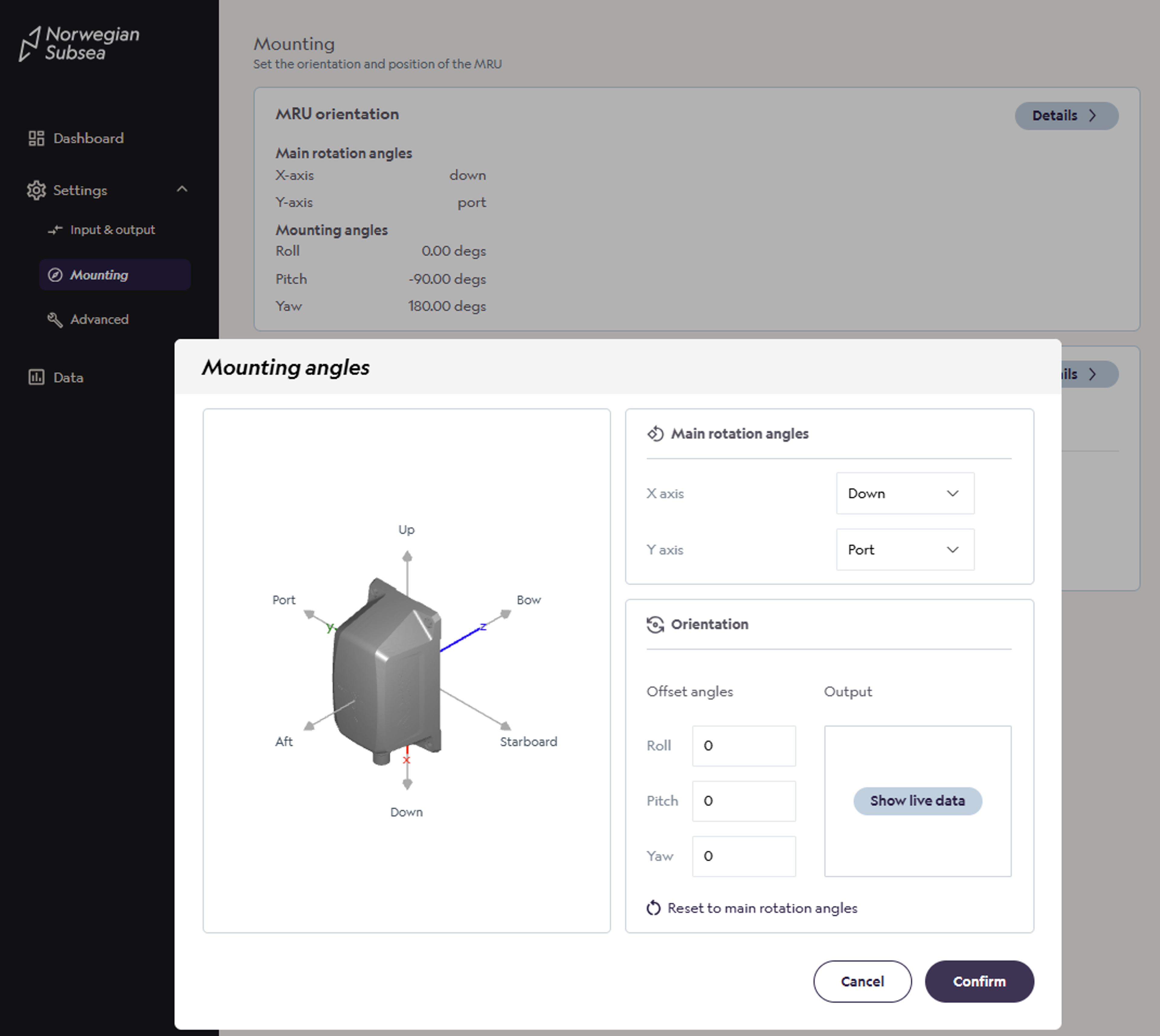
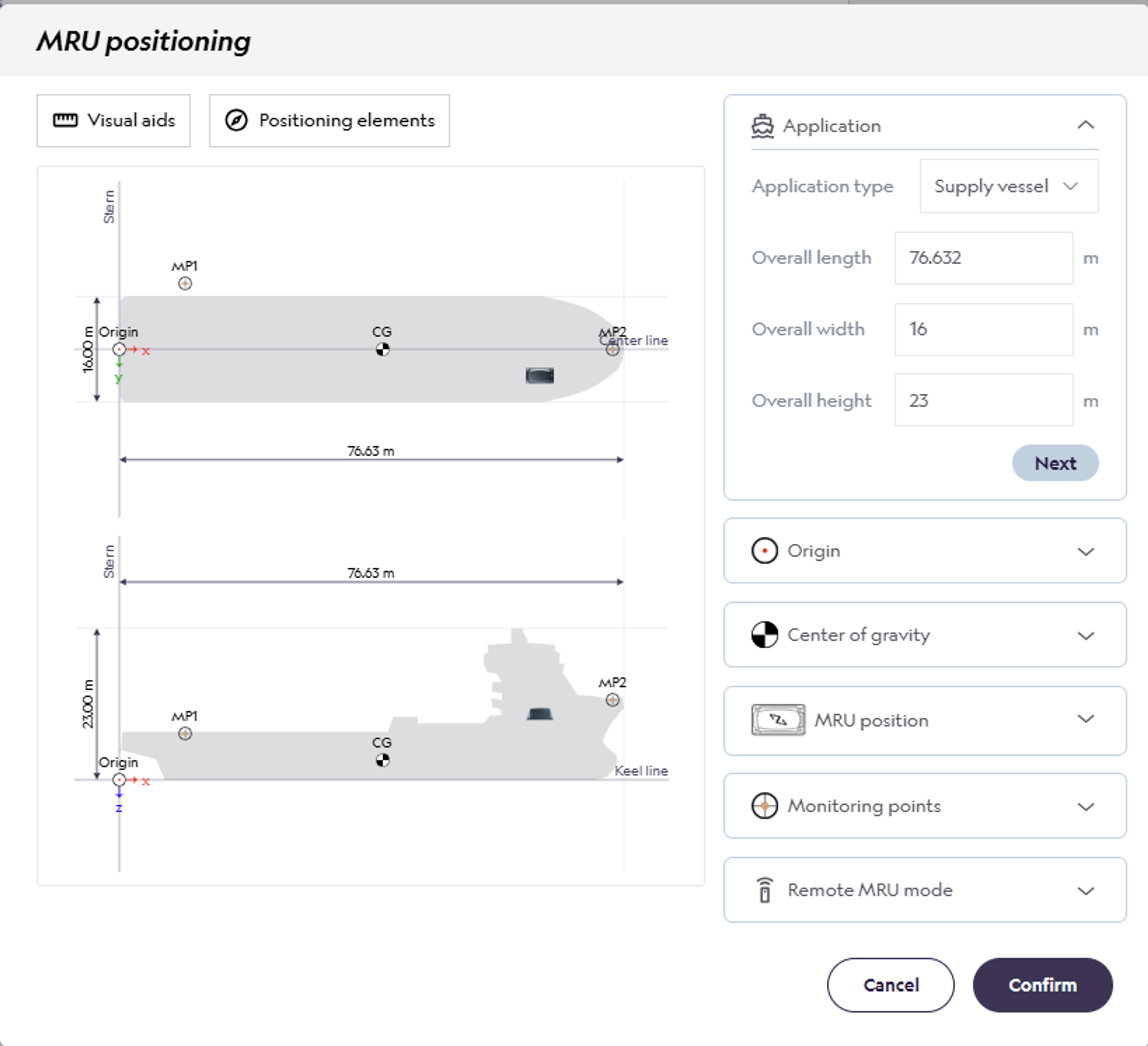
- MRU mounting orientation and location
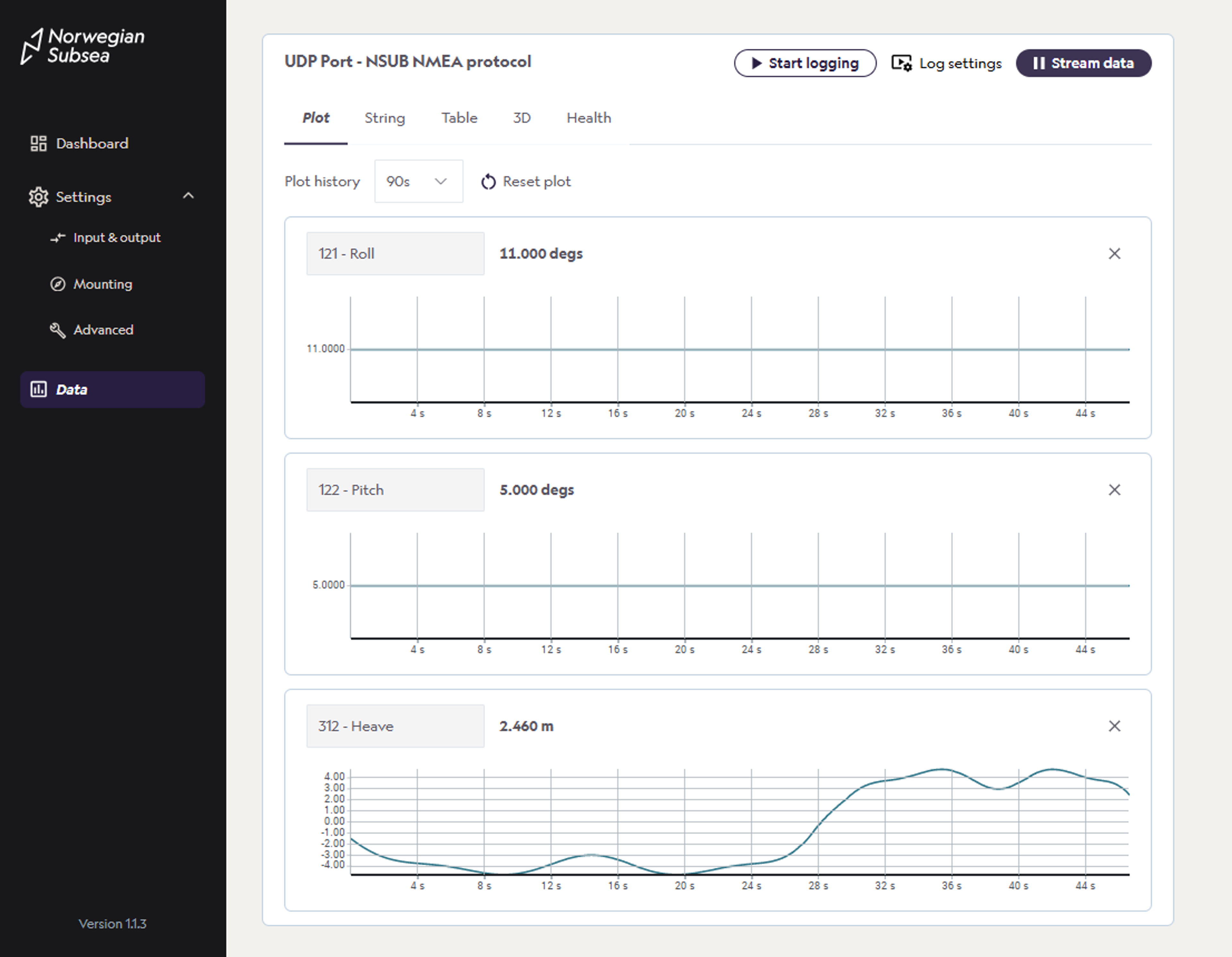
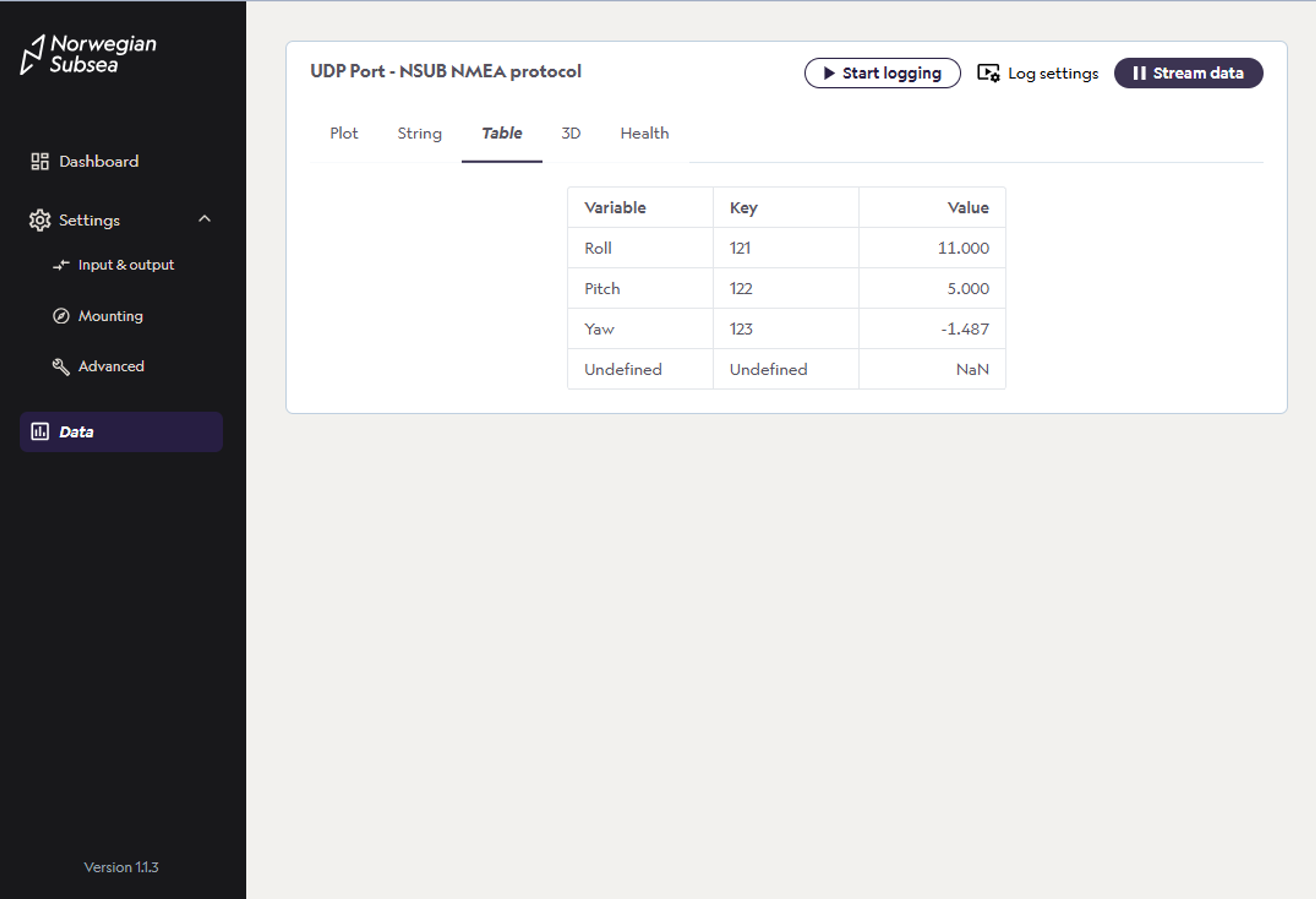
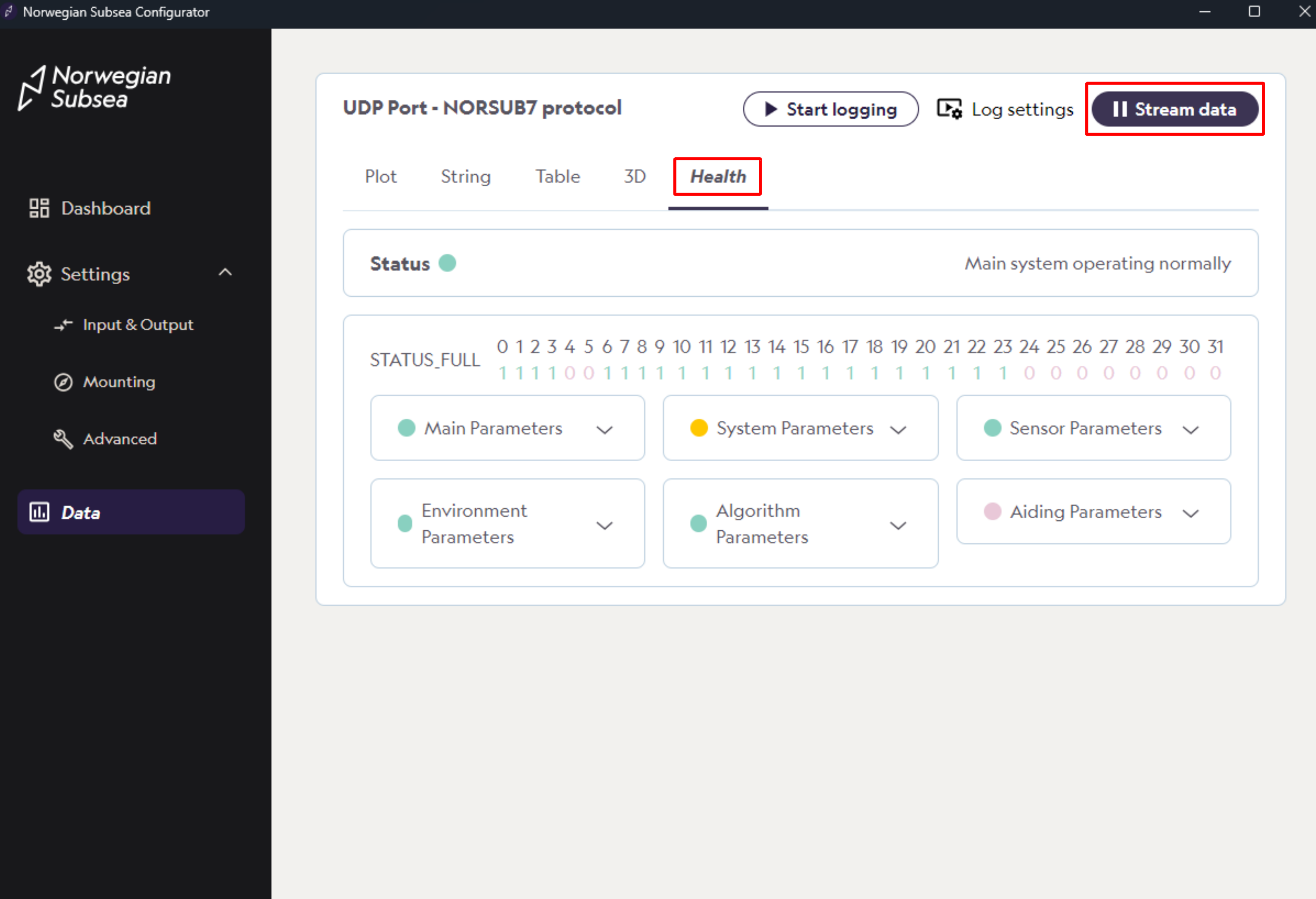
The configurator is also a great tool to monitor the outputs in real-time, plot the variables, check the on-board diagnostics and update the MRU firmware.
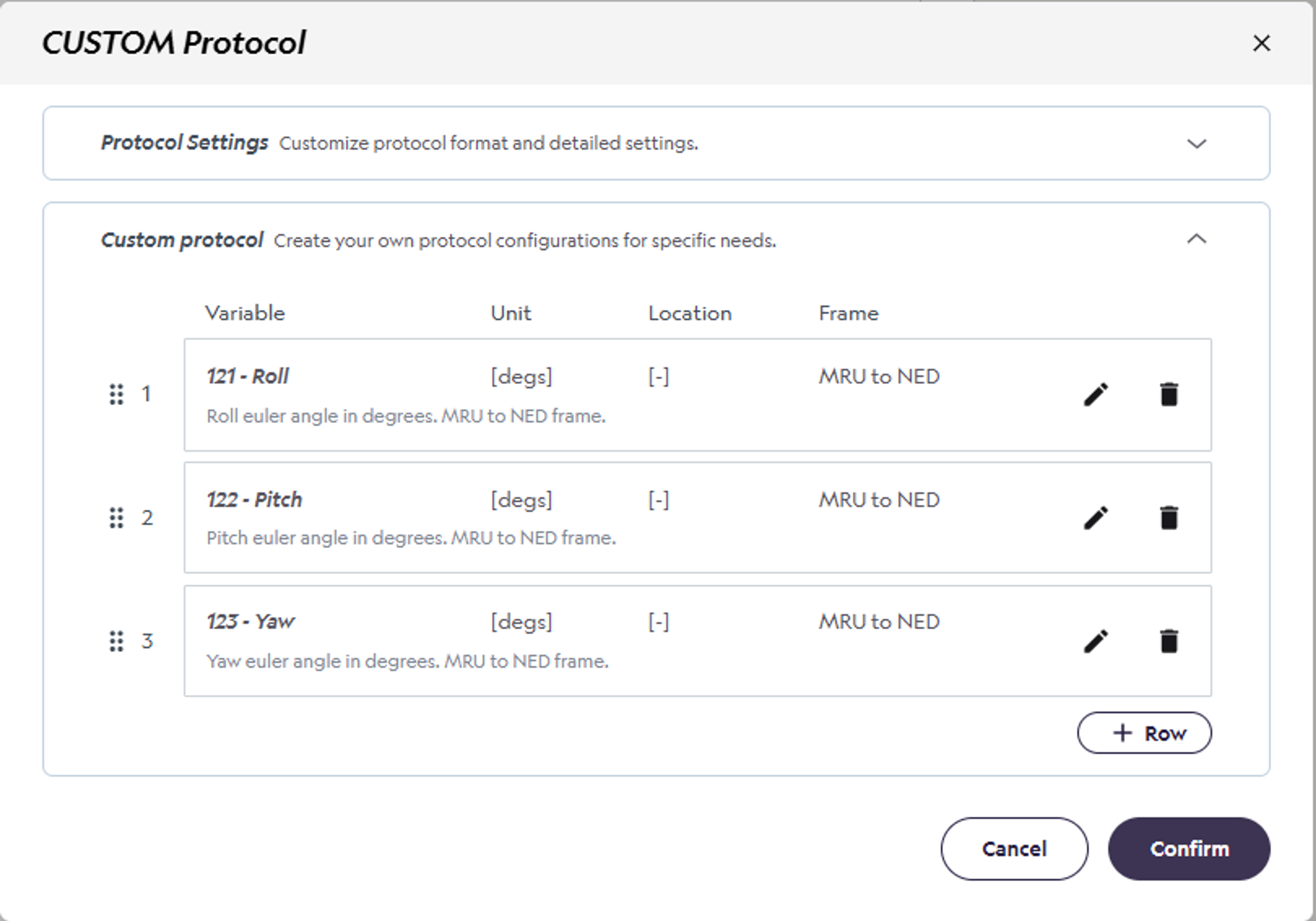
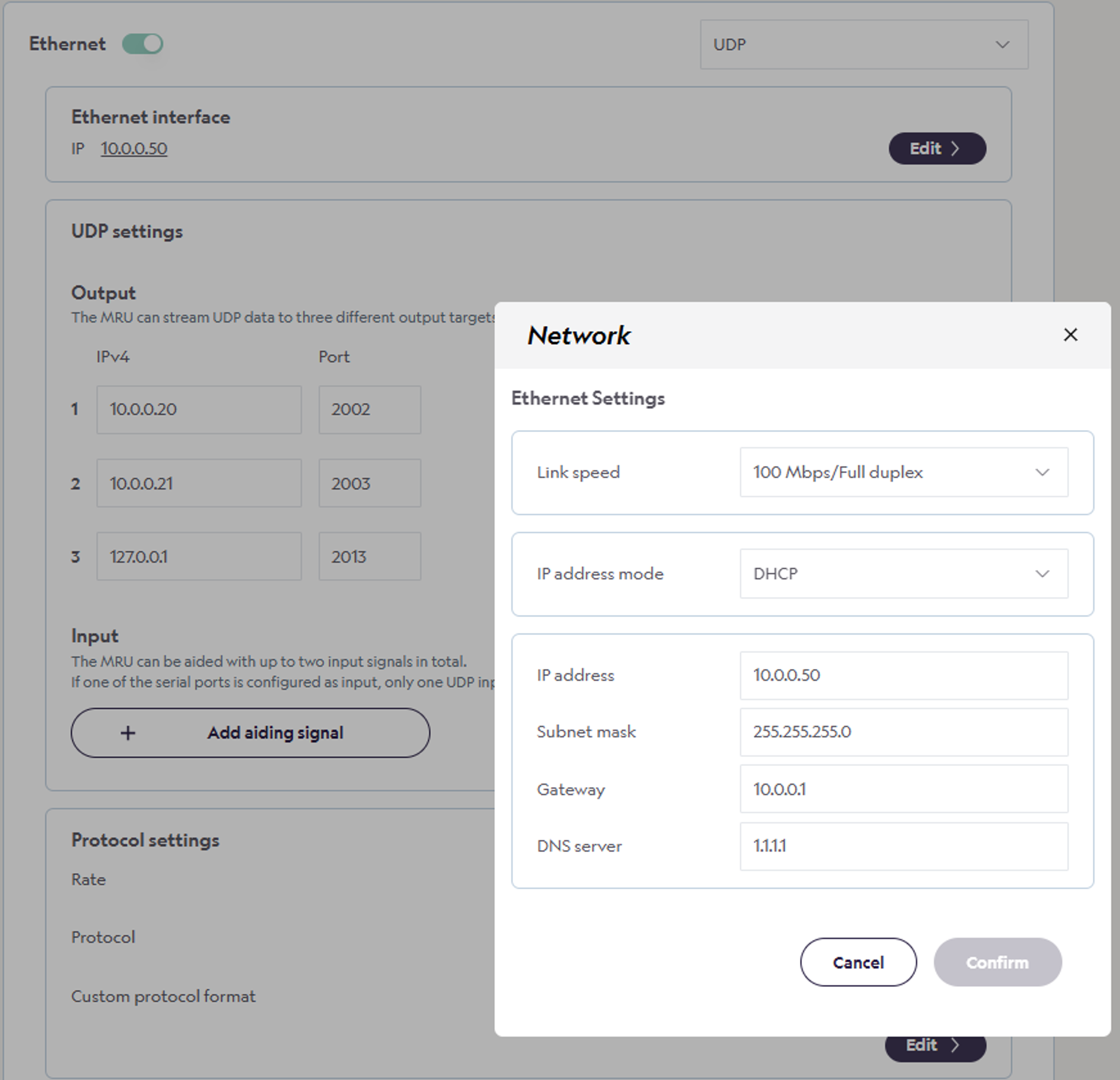
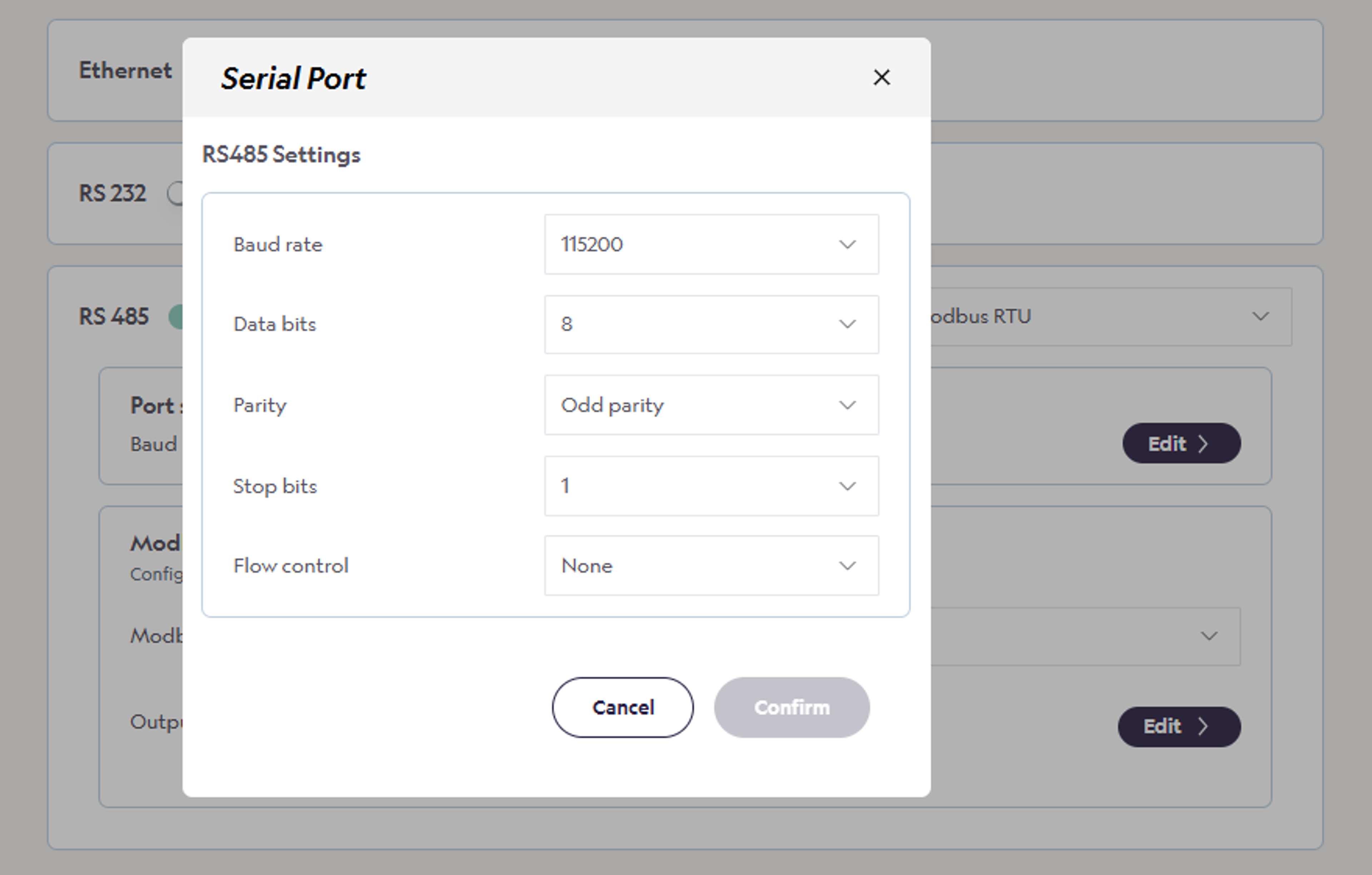
Set the communication protocols
The MRU configurator guides you through the choosing the communication ports and protocols.
The MRU supports Ethernet UDP, Modbus TCP, Ethernet/IP, RS-232, RS-485, 2-wire RS-485, Modbus RTU, analog +/- 10 V, analog 4-20 mA and more.
We recommend to define your own custome binary or NMEA protocol, providing you full control over your data.
Alternatively, choose from a variety of industry standard output protocols such as ATLAS, GYROCOMPAS1, IFREMER VICTOR, MDL, Tokimek PTVG, RDI ADCP, SMCA , SMCC , SMCCg, Simrad EM 3000 and TSS1.